



Det finnes ulike typer lagringshyller på lageret, og lagrings- og hentingsmetodene er i hovedsak delt inn i følgende kategorier, inkludert manuell lagring og henting, gaffeltrucklagring og -henting og automatisk lagring og henting. I dag ønsker mange bedrifter å realisere automatisk lagerdrift, så de ønsker å bruke automatiserte lagerhyller. For eksempel er fireveis bilstativ et slags automatisert oppbevaringsstativ. Hvordan kommer 4-veis skyttel AGV inn og ut av lageret? Lageret tunghylle produksjonsanlegg Haigris analysert.

Fireveis skyttellager
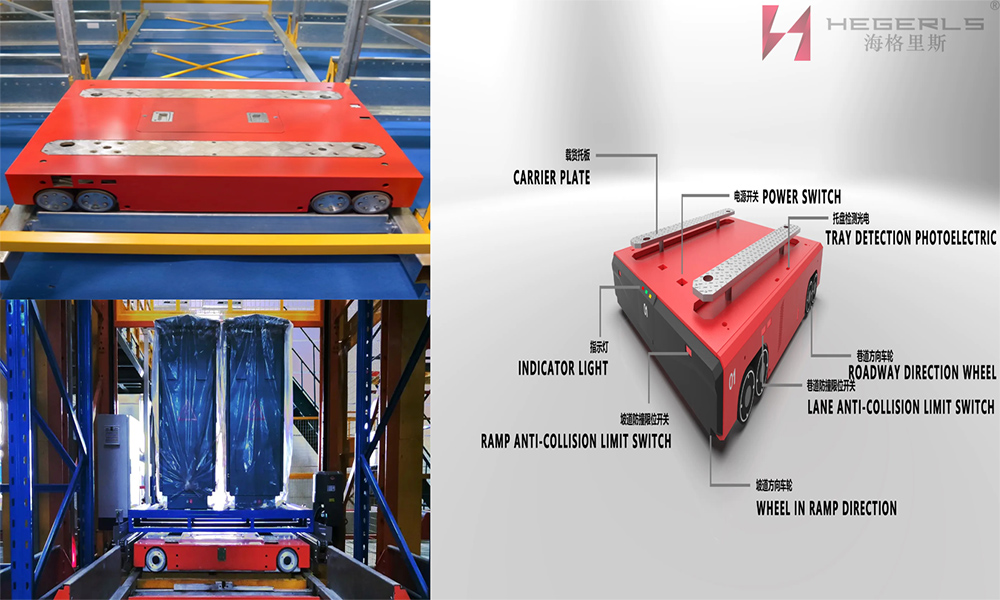
Fireveis skyttelbilen er utstyrt med 12 hjul, som kan kjøre i fire retninger langs sporplanet og fritt nå ethvert lasterom på lagerflyet. Fireveisskyttelen drives av hjulene på begge sider samtidig for å sikre at karosseriet ikke bøyer seg under drift, og den kan løpe vekselvis langs langsgående og tverrgående skinner på den tredimensjonale hyllen.

Samtidig er fireveisskyttelen en intelligent håndteringsenhet som ikke bare kan gå på langs, men også sideveis. Fireveis skyttel har høy fleksibilitet, kan endre arbeidsveien etter eget ønske, og justere kapasiteten til systemet ved å øke eller redusere antall skyttelbiler. Om nødvendig kan toppverdien til systemet reageres på ved å etablere planleggingsmodusen til arbeidskjøretøyteamet, løse flaskehalsen med inn- og utkjøring, og kan også erstattes med hverandre, når en skyttel eller heis svikter, andre skyttel eller heiser kan sendes gjennom ekspedisjonssystemet for å fortsette å fullføre operasjonen uten å påvirke systemkapasiteten. Denne enheten er egnet for lagring med både lav flyt og høy tetthet, samt lagring med høy flyt og høy tetthet. Det kan oppnå større effektivitet, kostnader og ressurser.
Hvordan kommer 4-veis skyttel AGV inn og ut av lageret?

1) Lagermetode
a) Teknikerne til den intelligente fireveis skyttelen slår først på den intelligente 4-veis skyttelen og gjør den klar. Den intelligente fireveis skyttelen er i standby;
b) Etter å ha bekreftet plukkestedet til den intelligente fireveis skyttelen, vil WCS planlegge kjøreruten i henhold til gjeldende plassering og destinasjonsplasseringen til den intelligente 4-veis skyttelen, og deretter vil personalet distribuere varer til den intelligente fireveis skyttelen. skyttel gjennom WCS;
c) Den intelligente fireveis skyttelen begynner å utføre leveringsoppgaven i henhold til den mottatte oppgavekommandoen;
d) På kryssingssporet kjører den intelligente fireveisskyttelen i forskyvningsmodus gjennom den faktiske avstanden. Under kjøreprosessen skanner den kontinuerlig sporene som den nedre delen av kjøretøykroppen passerer gjennom. Hver kryssingsposisjon den passerer, bedømmer og kalibrerer den avstanden den reiser ved å skanne sporene. Når den er nær destinasjonen, finjusterer den parkeringsposisjonen gjennom den laterale lasersensoren for å oppnå nøyaktig posisjonering av parkeringsposisjonen;
e) I underkanalen kan den intelligente fireveis skyttelen skanne tverrsporet og sidekalibreringsspeilreflektoren, bedømme og sjekke kjøreavstanden ved å skanne punktposisjonen, og oppnå nøyaktig posisjonskontroll i underkanalen for å nå målet;
f) Når den intelligente fireveisskyttelen ankommer den valgte plukkeposisjonen, faller pallen, varene legges på hyllen og WCS-systemet varsles om fullført leveringsoppgave;
g) Den intelligente fireveis skyttelen fortsetter å motta oppgaveinstruksjoner eller går tilbake til standbyområdet.
2) Leveringsmåte
a) Teknikerne til den intelligente fireveis skyttelen slår først på den intelligente 4-veis skyttelen og gjør den klar. Den intelligente fireveis skyttelen er i standby;
b) Etter å ha bekreftet plukkestedet til den intelligente fireveis skyttelen, vil WCS planlegge kjøreruten i henhold til gjeldende plassering og destinasjonsplasseringen til den intelligente 4-veis skyttelen, og deretter vil personalet sende plukkeoppgaven til de intelligente fire -veis skyttel gjennom WCS;
c) Den intelligente fireveis skyttelen begynner å plukke opp varer i henhold til den mottatte oppgavekommandoen;
d) På kryssingssporet kjører den intelligente fireveisskyttelen i forskyvningsmodus gjennom den faktiske avstanden. Under kjøreprosessen skanner den kontinuerlig sporene som den nedre delen av kjøretøykroppen passerer gjennom. Hver kryssingsposisjon den passerer, bedømmer og sjekker den avstanden den reiser ved å skanne sporene. Når den nærmer seg målet, finjusterer den parkeringsposisjonen gjennom lasersensoren på siden for å oppnå presis posisjonskontroll og parkering;
e) I underkanalen skanner den intelligente fireveis skyttelbilen tverrsporet og sidekalibreringsspeilreflektoren, bedømmer og kalibrerer kjøreavstanden ved å skanne disse punktene, og realiserer kontrollen av presis posisjonering i underkanalen for å nå målet .
Innleggstid: 19. september 2022